Mighty Man
After the Northeast Indiana Robot Games at Science Central February, 2002, Brendan decided that he wanted to compete in the Lego Sumo competition. A simple chassis was developed that placed the Lego RCX as low as possible while still providing four motors with gear drive to four wheels. The resulting structure was locked together with vertical beams into a solid structure. All of this and it still easily fit within the 8 inch square! This was not a trivial task and much trial and error development resulted in a simple, efficient structure. Four sensors were used: two line sensors and two switches on the two arms. The left line sensor and the left arm switch plugged into port 1 and the right line sensor and the right arm switch plugged into port 3. If the RCX saw an a light reading over 90 on port 1 or port 3, then one or both of the arm switches were activated and Mighty Man pushed. If the RCX saw a reading less than 90 but over 44, then the line was detected and Mighty Man turned around. If the RCX saw a reading under 44, then Mighty Man continued its search pattern. |
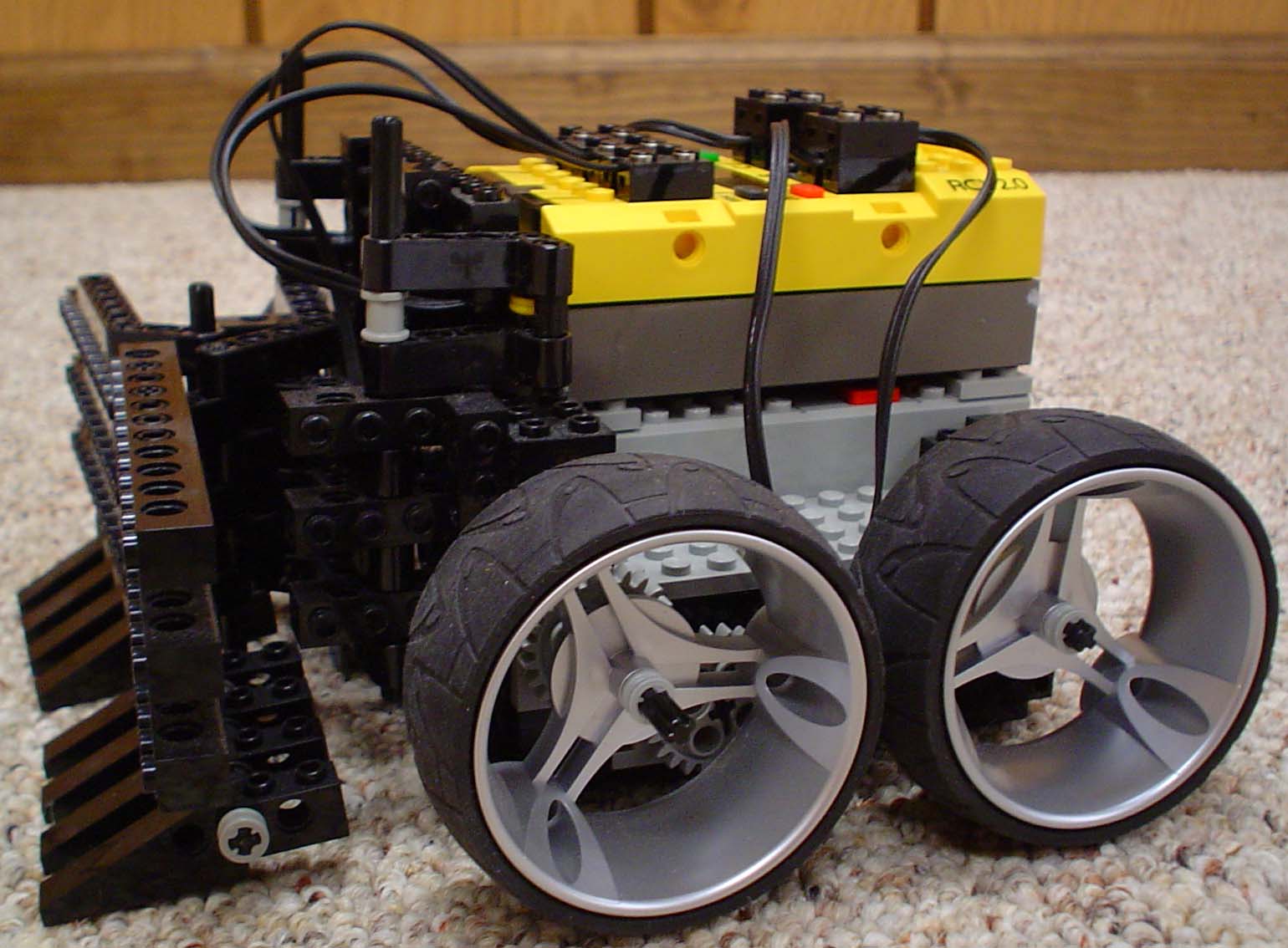
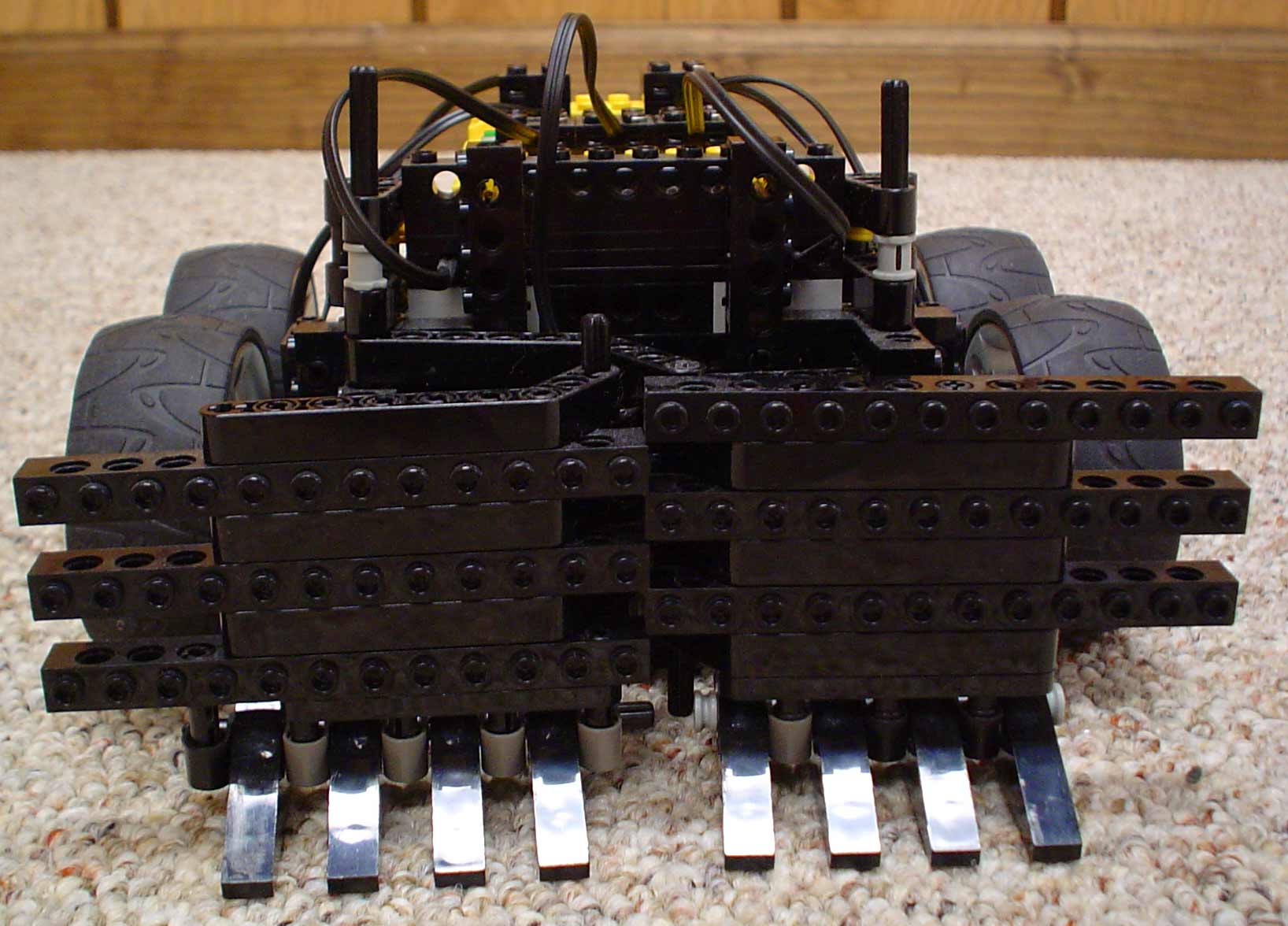 Initial test were promising. Two line sensors on the ends of the front arms correctly found the white edge and Mighty Man turned the appropriate direction to best avoid running off of the circle. When pushing a pop can, the first major problem arose. Either the right arm would switch and Mighty Man would turn to the right, or the left arm would switch and Mighty Man would turn to the left. It seemed that both arms were never pushed at the same time. The arms were redesigned in the crossing pattern that is shown in the pictures. Initial test were promising. Two line sensors on the ends of the front arms correctly found the white edge and Mighty Man turned the appropriate direction to best avoid running off of the circle. When pushing a pop can, the first major problem arose. Either the right arm would switch and Mighty Man would turn to the right, or the left arm would switch and Mighty Man would turn to the left. It seemed that both arms were never pushed at the same time. The arms were redesigned in the crossing pattern that is shown in the pictures. |
| Since the start of the match placed the opponent Sumo to the right or the left of Mighty Man, two separate programs were entered into program slot 1 and program slot 2. Program slot 1 contained a program that started with a 180 degree turn to the right before the search pattern was initiated. Program slot 2 contained a program that started with a 180 degree left turn before the search pattern was initiated. This aggressive search routine resulted in a second place out of five Lego Sumo competitors at the August, 2002 Northeast Indiana Robot Games. |
 For the February, 2003 Northeast Indiana Robot Games, two battery packs were added for additional weight. Gear ratios were reduced to prevent stalling the rear motors. At the games, Mighty Man got a headache after its first winning push and lost all of its programs. The poor mindless Mighty Man lost the first match as a result. A refreshed memory resulted in victories in the remaining matches. The first lost dropped its finishing position to fourth. For the February, 2003 Northeast Indiana Robot Games, two battery packs were added for additional weight. Gear ratios were reduced to prevent stalling the rear motors. At the games, Mighty Man got a headache after its first winning push and lost all of its programs. The poor mindless Mighty Man lost the first match as a result. A refreshed memory resulted in victories in the remaining matches. The first lost dropped its finishing position to fourth. |
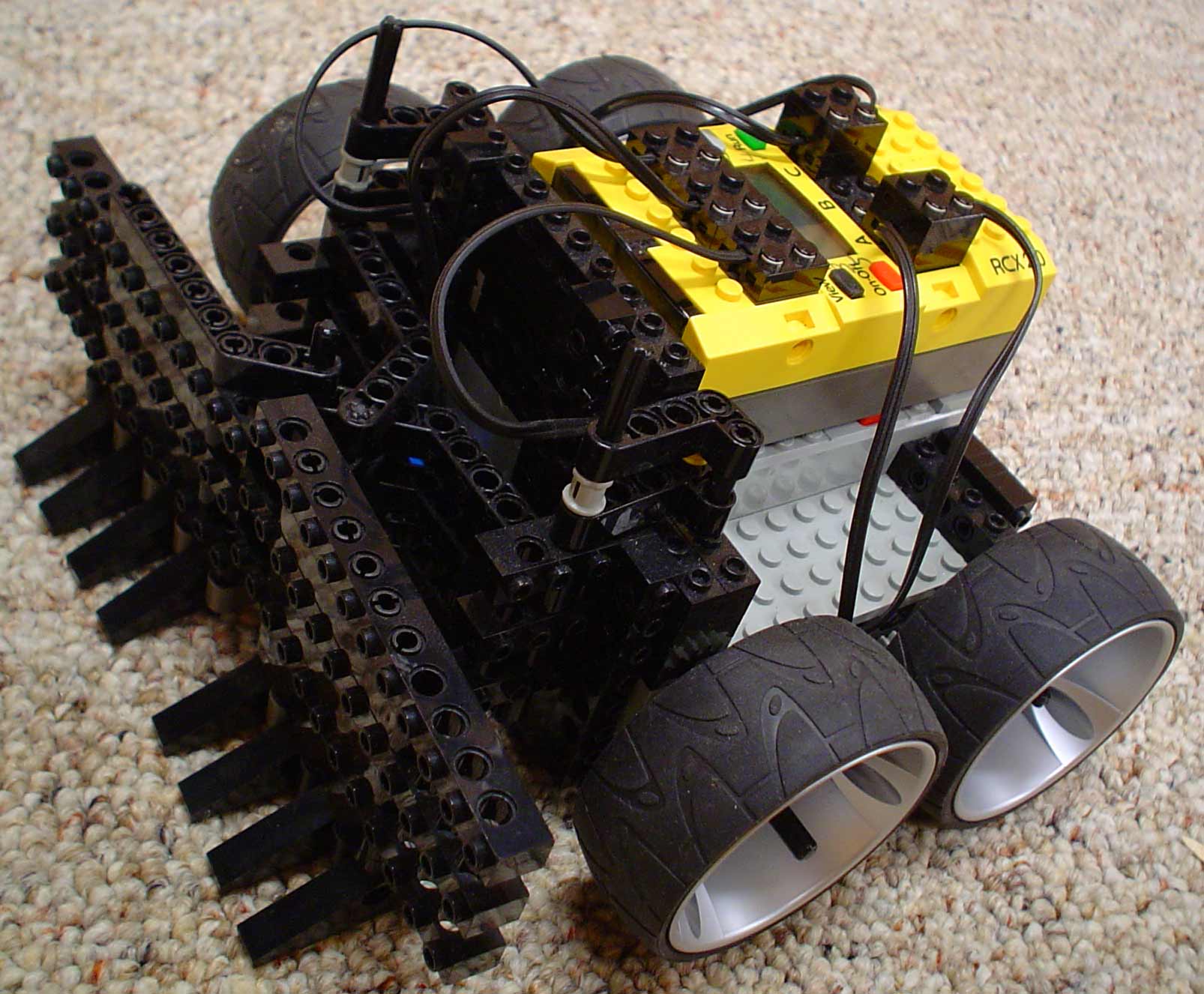 Since the geared down Mighty Man was so slow, the two line sensors were replaced with one sensor in the middle. That allowed the arm switches to be reconfigured such that they were normally pushed, but released when the arm contacted something. This made for much more responsive arm sensors. That is the configuration that is pictured here. Since the geared down Mighty Man was so slow, the two line sensors were replaced with one sensor in the middle. That allowed the arm switches to be reconfigured such that they were normally pushed, but released when the arm contacted something. This made for much more responsive arm sensors. That is the configuration that is pictured here. |
| Since other competitors were learning about the 180 degree turn at the start, two more start routines were developed. Program slot 3 contained a program that started with a 360 degree turn to the right before the search pattern was initiated. Finally, program slot 4 contained a program that started with a 360 degree turn to the left before the search pattern was initiated. It became a problem to remember the programs. |
| The August, 2003 Northeast Indiana Robot Games were not good for Mighty Man. A rule change allowed larger, heavier robots. Also, external batteries powering the motors appeared to be the rule. Mighty Man was not competitive. We will have to wait for another open Lego event that limits weight to two pounds. |